









Sign In to CharterOak.org | Login Now
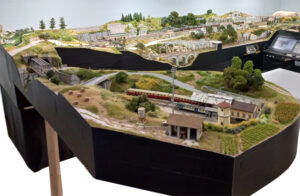
Il plastico può essere visitato ogni lunedi, venerdi e sabato previa prenotazione tramite questo modulo. Confermeremo la prenotazione o vi ricontatteremo per concordare data e orario.
TrainPassion è “no-profit”, le visite sono gratuite; se però voleste contribuire, vi suggeriamo un atto di solidarietà, una donazione a “Emergency“